親機が完成しました。
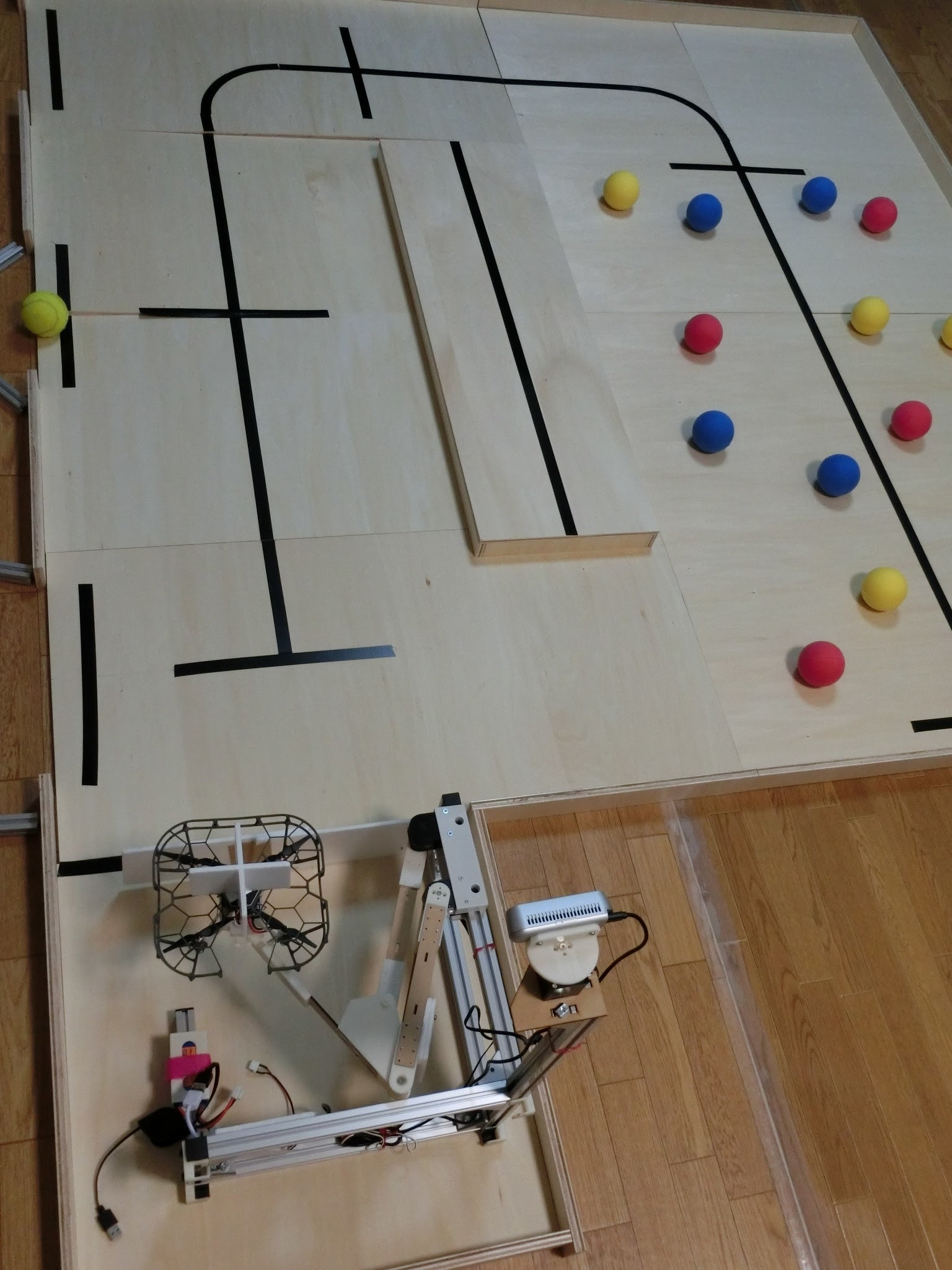
子機のクワッドコプターをスタート時保持・運搬するアーム(子機スタート装置)と、位置観測用カメラ、そしてボールを誘導するために展開する壁という3つの機能を備えています。

子機スタート装置

知能ロボコンのルール上、ロボットはスタート時にスタートエリア内かつ45cm角の大きさに入っている必要があるります。そのため子機は親機に格納しておき、そこからスタートします。Realsenseカメラは近すぎる物体は正確に検出できず、また通常のカメラ同様近くでは少しの移動で視野範囲から外れやすくなります。そのためロボット前方にアームを伸ばしてそこから離陸させます。
格納時よりおよそ37cm前方まで子機を移動させることができます。
動力にはKONDOのロボット用サーボKRS-5053HVを使用しています。これは以前二足歩行ロボット用に購入したものからの流用です。リンクの根本に黒い箱が2つ付いていますが、片方がこのサーボ、もう一方はサーボと同じ寸法で作ったベアリング固定用の部材(所謂ダミーサーボ)です。
壁
スタートに最も近いゴールに右側からボールを誘導して転がしてくるという方法を取ります。対象物エリアから続くフィールド外周の壁はスタートエリアで途切れており、またスタートエリアからゴール開口部までの間に10cmほど距離があります。そこでスタートエリア右からゴール開口部に向けて映像のように斜め方向の壁を作ることで、ボールが壁沿いにゴールに誘導されるようにしました。
壁の展開は後から付け足したもので、アーム用のリンクの動力を利用しています。
カメラ雲台
地上からおよそ50cmの高さにカメラを保持します。また、子機の動きを追うため左右に回転します。KONDOのロボット用サーボKRS-5054HVを使用しています。回転角の指令の他、シリアル通信で現在角度を取得できるため、これをもとにカメラの姿勢を取得、床面に固定した座標系におけるロボットの位置を算出しています。モデル化およびキャリブレーション過程など、後日別記事に書こうと思います。
映像は、カメラを意図的に運動させ続けた上で子機の位置が正しく得られていることを確認しているところです。およそ正しい位置を推定してホバリングを行えているのですが、動きの切り替わりなどの際に若干誤差が出ることがあり、それが制御に悪影響を及ぼしています。
ノートPCホルダ
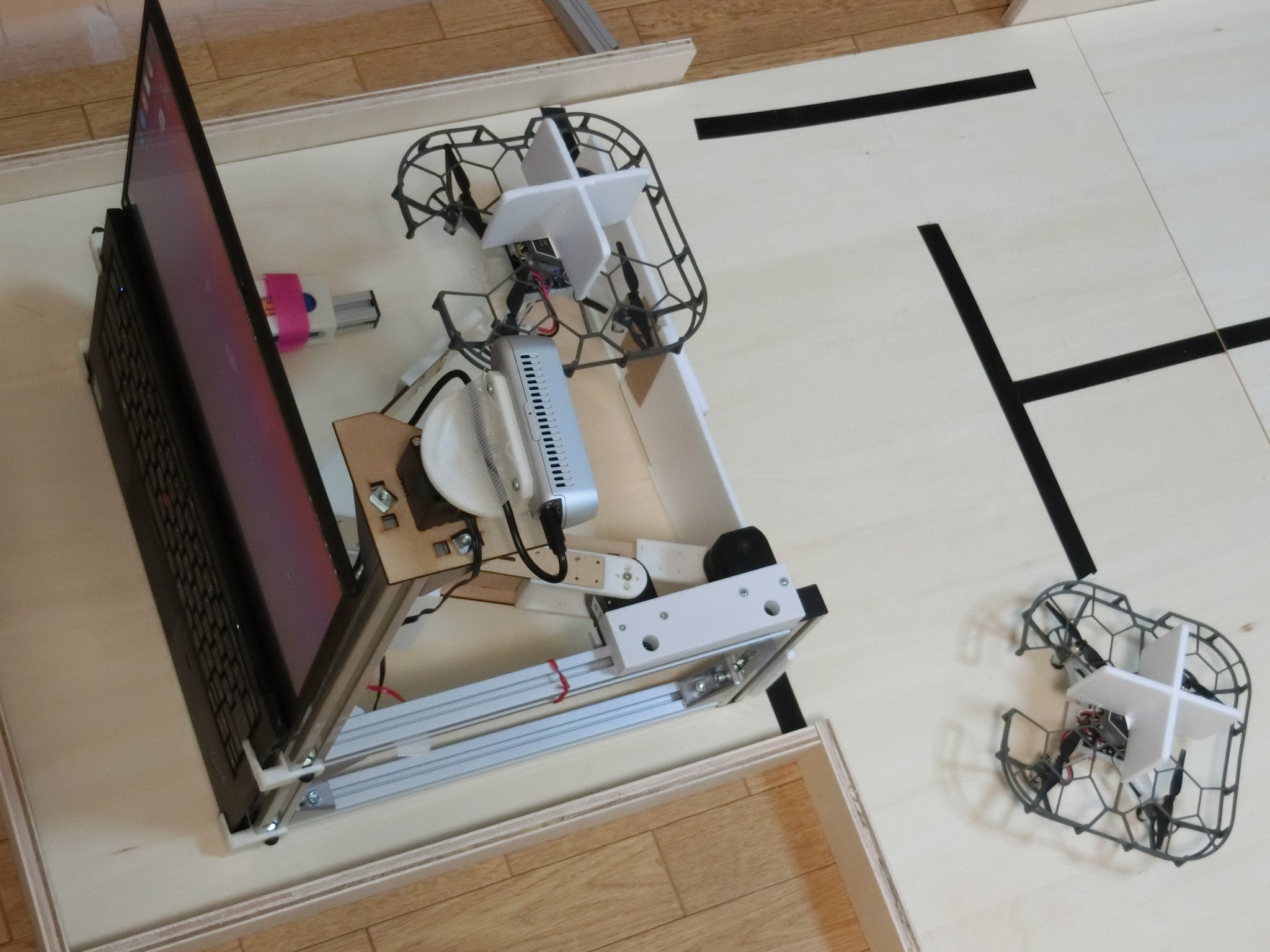
デプスカメラであるRealSenseのデータ取得と処理のため、ロボットにノートPCを搭載します。これにより外部にケーブルで接続された機器がなくなるため、知能ロボコンのルール上「自立型」となります。
ディスプレイを180度に開いたノートPCを上から差し込むような形で着脱します。ロボット側にUSBハブと延長ケーブルが固定されており、USBコネクタ1箇所でノートPCと接続して動作します。




0 件のコメント:
コメントを投稿