電源の見直しを行いました。
以前、モーターを回すとマイコンに電源供給ができなくなっていたのは、電池からの中継配線が細かったのも一因でした。
また、JS PHコネクタの電流容量は2Aで、今回のアプリケーションはその範囲を数倍超えるため使わないことにしました。更に、試したバッテリのうちいくつかに使われていたMolex 51005/51006 (海外の通販サイトなどではLOSIコネクタと表記されている)も同様に2A程度でした。代わりに、手持ちのコネクタの中でこのぐらいのオーダーの電流に耐えられるものとして、日圧の基板対電線コネクタVHを使ってみました。(これは実験用の仮配線ということで、最終的には緊急停止回路等を間に入れたいと思います。)

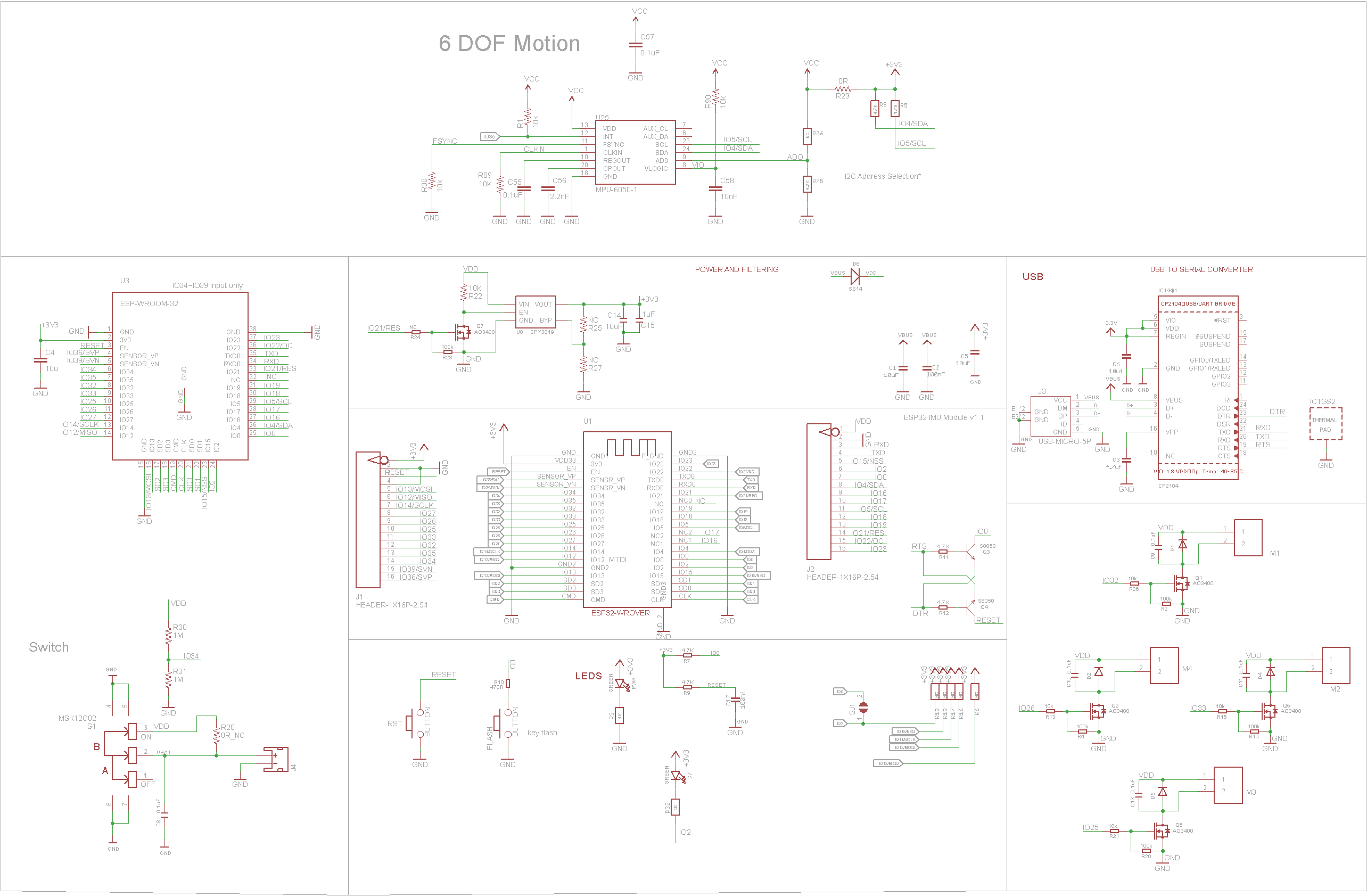
なお、基板上で「5V」と表示されている端子を使っていますが、実際にはVDD(バッテリーの正極およびUSBバス電源からD6を介して供給される)でした。回路図ではそうなっています。
配線と電池の交換で、フル出力でも動作できるようになったので、消費電力を見積もるためのホバリングの実験を行いました。
- 重量87g(Telloとほぼ同じ)
- 物理的補助あり(姿勢制御は未だ完成していないので)
- 床から80cmぐらい(地面効果の影響を避けるため)
- 手動操縦でスロットル(PWM duty比)調整
- 7~8割程度で重力と釣り合ってホバリングした
- 2分半で電池切れ
ぎりぎり及第点といったところですが、モーターにもバッテリにもかなり無理な負荷になっているように思います。
同じ重量なのに余力が少ないことから、Telloより少し効率が悪くなっているようです。
また、バッテリも手ではっきりとわかるぐらい温度が上がっていたので、もう少し大きい容量のバッテリに変更した上で軽量化を図る必要があります。




{kind=link}
0 件のコメント:
コメントを投稿